

Robot sumo is a contest where one robot tries to push another robot out of a ring, without harming the opponent. (See Robot Sumo Rules for more information.)
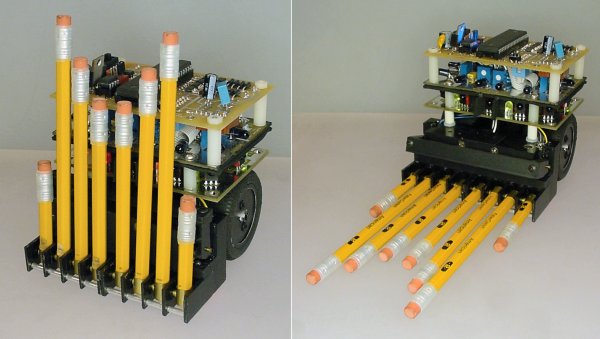
Front views of No.2, a champion autonomous mini-sumo robot
Over the years, I’ve built half a dozen different mini sumo robots, including Bugdozer, Hard2C, Have A Nice Day, and Roundabout Sumo. When designing a new robot, I try to learn lessons from the weaknesses of prior robots, but additionally come up with at least one radically different feature or strategy. For example, Have A Nice Day featured a very long spatula-like scoop, in hopes that the opponent would just drive onto the spatula and get dropped off at the side of the ring.
Sometimes the implementation of the unconventional element can doom the robot. For example, Hard2C was made as short as possible to avoid being detected by the opponent’s sensors, which are usually mounted up fairly high to avoid reflections from the ring surface. Unfortunately, my robot’s short wheels ended up being too small and narrow to grip firmly. To make matters worse, this dense, low robot had the majority of its weight resting on the front (the sliding portion), instead of loading down the motor driven wheels to increase friction. As such, even when Hard2C snuck up behind an opponent, it didn’t have enough pushing power to eject the opponent from the ring.

No.2, Champion Sumo Robot
No.2 (pronounced “number two”) is built on the strengths of the successful drivetrain and wheelbase of Roundabout Sumo. Two large LEGO 49.6 x 28 VR tires provide significant traction. You can find the tires on some LEGO models in most toy stores. But, to save money and to obtain only the specifically required parts, I usually get my LEGO wheels from BrickLink.com or eBay.com.
Inside each wheel is a Copal 50:1 gearmotor that I bought at RobotMarketPlace.com. (You can learn how to make this exact setup in the book “Intermediate Robot Building”)
This robot has the raw pushing power to beat almost any opponent. But first, how does No.2 find the robotic opponent? And when it does, how does this robot avoid getting scooped? Let’s see...